A biomechanical model for estimating moments of force at hip and knee joints in the barbell squat
by Bruce
Ross, CEO, MyoQuip Pty Ltd (October 2006)
Introduction
The barbell squat is a complex, mass load bearing multi-articular exercise movement. It is the basic lower body exercise prescribed in training programs for many sports even though it is unpopular with most athletes and is often performed inexpertly. One of the major problems when performing a full squat with heavy weights is that there appears to be excessive loading in the bottom part of the movement. At the same time loading through the top range of the movement seems inadequate.
This study examines the extent to which these
effects may be attributable to changing values
of resistive torque in moving from deep flexion
to full extension of the hip and knee joints,
i.e., to changes in limb geometry. A basic biomechanical
model of the squat has been developed to calculate
moments of force or torque applied about the
axes of the hip and knee joints at various angles
of those joints. I am not aware of any previous
comparable study of the free weight squat.
The Model
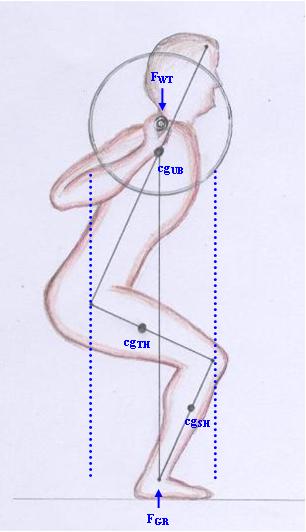
A mathematically scaled model of a person of 180cm height and 100kg body weight was created consisting of four linked segments. These were the upper body or HAT (head, arms and trunk) assumed to be a rigid member; the thighs; the shanks; and the feet. The lengths of the segments as a percentage of total height were 50, 24, 22, and 4 respectively. Centres of gravity for the thighs and shanks were assumed to be both at 43.3% of segment length measured proximally. The proportion of body weight for the upper body, thighs and shanks was estimated as 68.6%, 20.0% and 8.6% respectively.
In order for stability to be maintained in squatting, the centre of gravity of the system (exerciser's body plus weight bar) must remain directly over the feet. Unless the centre of mass is constantly positioned directly above the ground reaction force vector, a moment would exist and the system would rotate, i.e., tip forward or backward.
To provide a determinate model and to facilitate calculation, a number of simplifying assumptions were used, Firstly, throughout the exercise movement the hip and knee joints move synchronously, i.e., at any point their angles are equal. Secondly, the force vector of the weight bar (FWB) was assumed to be located directly above that of the upper body (cgUB). Thirdly, it was assumed that the centre of gravity of the system remains directly above the ankle joint rather than at the midpoint of the foot as is usually and more correctly assumed. Figure 1 shows a simplified free body diagram incorporating the assumptions.
At each observation point throughout the exercise the body is evaluated in a static or constant velocity state and therefore can be treated as rigid. Moments of force were calculated for the knee and hip joints using a link-segment model of the form described in Winter (1990).
Other than its contribution to total body mass
the weight of the exerciser's feet was ignored.
For the present calculations the mass of the
loaded weight bar was assumed to be 100kg. Its
force (FWB) contributes to moments
about the joints. The vertical reaction force
(FGR) from the floor to the exerciser's
feet also provides a force of flexion about
the hip and knee joints. The constant velocity
assumption means that the ground reaction force
is simply the sum of the body mass and the mass
of the weight bar, i.e., 200kg in this application
of the model.
The range of motion investigated was from deep flexion of 40° for both hip and knee joints to lock-out or full extension at 180°.
Figure 1
Results
Figure 2 shows the moments of force about the
hip and knee joints calculated using the model.
It can be seen that very high moment values
occur in deep squat positions. In fact at 60°
flexion of both joints, torque values are 470N.m
and 333N.m for the hip and knee joints respectively.
In this model the parallel position for the
thigh occurs at joint angles of 62.5°. This
is the position where the hip and knee joints
are furthest from the force vectors of the weight
bar and upper body, with the result that torque
values for hip and knee joints reach their maxima
here at 471N.m and 334N.m respectively.
Below this point it can be seen that torque
values are declining, but this effect is counteracted
by the fact that the leg extensor muscles are
lengthening and therefore increasingly less
able to deliver force.
It can also be seen that as the exerciser rises
above joint angles of around 90° the torque
values decline markedly and approach zero with
full extension or lock-out.
I am unaware of any published studies of strength
curves for complex exercises like the barbell
squat but it can be expected that the leg extensor
muscles function most efficiently in the mid
range of the exercise movement. The conjunction
of such a muscle strength profile with the torque
curves shown above means that a heavy load would
place the exerciser in a biomechanically disadvantageous
position in the deep range of the movement.
At the same time there would be inadequate effective
activation of the leg extensor muscles through
the top range.
Figure 2
It should be noted that the torque values were
calculated with the exerciser stationary at
each joint position, so they are isometrically
determined. Different results would be obtained
if measurements were made of actual dynamic
movement. Results would also vary if the assumption
of synchronised joint angles did not apply.
However in both situations similar extreme variations
in torque between bottom end and top end positions
could be anticipated.
Correcting for variations
in joint torque
A number of methods have been developed to
improve the efficacy of the squat exercise.
The most well known involve the addition of
metal chains or rubber bands to the squat apparatus.
With the former sections of chain are hung from
each end of the weight bar. As the lifter descends
links begin to pile on the floor, lessening
the effective load and consequently the joint
torque.
The usual method of using bands when squatting
is to attach one or more heavy rubber bands
to each end of the weight bar and anchor them
to hooks on the floor. As the lifter rises tension
in the bands increases adding to the effective
load and the joint torque. However this system
has no effect on the torque at the bottom end
of the movement. To correct this a reverse band
technique is employed. Here the bands from the
weight bar are attached to the top of the squat
rack or the ceiling. As the lifter descends
tension in the bands increases, thereby compensating
for the increasing torque in the bottom range.
The MyoQuip
ScrumTruk has been developed to overcome
the deficiencies in the conventional squat.
It solves the problem of excessive variation
in torque in two ways. Firstly it is operated
in a horizontal body position thus greatly reducing
the contribution of the user's own body weight
to torque generation. Secondly its use of QuadTorq
variable resistance technology compensates
for torque variation at both ends of the movement.
The ability to make adjustments to the rate
of change of load means that the user can experience
appropriate load and effective muscle activation
through the whole range of movement.
Why tall people can't
squat
It is generally recognised that people with
long limbs are poor squatters. They often look
awkward performing the exercise and the poundages
they lift are usually unimpressive. The present
study sheds light on why this is so.
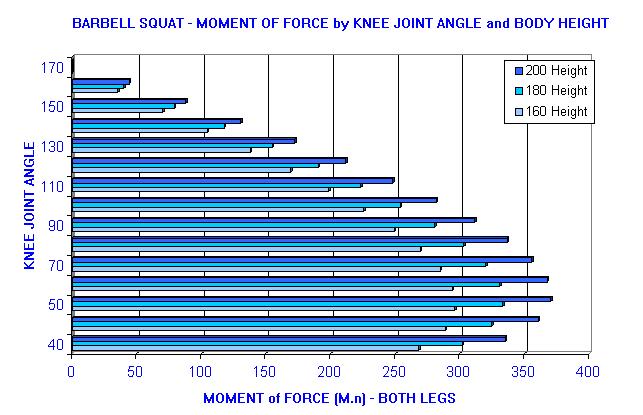
Figure 3
Figures 3 and 4 compare the joint moment forces
generated in the squat by three lifters of different
height. In each case we assume that the lifter
weighs 100kg and is squatting a weight bar loaded
to 100kg. The assumed body heights are 160cm,
180cm and 200cm. Inspection of the two charts
indicates that torque values vary directly with
body height. In fact it can be seen that the
moments of force at any joint angle are 25%
higher for an athlete of 200cm than for one
of 160cm. Therefore in the bottom range of the
movement they are much more subjected to excessive
loading.
Figure 4
There is an additional effect. Given that work
can be measured as force times distance, it
is obvious that a tall person will rise further
and therefore perform more work than a shorter
person. Again our 200cm subject is performing
25% more work than their 160cm counterpart.
Thus there are logical reasons for the perceived
poor performance of tall people in the barbell
squat.
Conclusion
This study has demonstrated that throughout
a deep squat movement with heavy loading the
moments of force experienced at the hip and
knee joints typically vary from excessive to
inconsequential. Because of this the leg extensor
muscles are likely to be effectively activated
for only a minor part of the exercise movement.
It therefore seems appropriate to question
the efficacy of the squat as a general exercise
for developing leg strength. In particular the
wisdom of its use in preparing athletes for
participation in sports that themselves have
high incidence of back and knee injury must
be doubted.
References
Abelbeck, K.G. Biomechanical model and evaluation
of a linear motion squat type exercise. J. Strength
Conditioning Res. 16: 516-524. 2002.
Robertson, D.G.E., G.E. Caldwell, J. Hamill,
G Kamen and S.N. Whittlesey. Research Methods
in Biomechanics. Champaign, IL: Human Kinetics,
2004.
Winter, D.A. Biomechanics and Motor Control
of Human Movement. New York: John Wiley and
Sons, Inc. 2nd Edn. 1990.
This article also
appears on the MyoQuip
Blog website
Comments are welcomed.
For inclusion please email to Bruce
Ross.
(This article may be reproduced so long as
full acknowledgement of sources is provided.)